
PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD

 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


IMU主要用于需要运动控制的设备,如汽车和机器人。它也用于需要精确的姿态位移估计的场合,如潜艇、飞机、导弹和航天器的惯性导航设备。
高精度稳定控制MEMS IMU
采用三轴地磁解耦和三轴加速度计,受外力加速度影响较大。在运动/振动环境下,输出方向角误差较大。这种磁场传感器有缺点。它的绝对参考点是地磁场的磁力线。地磁的特点是用途广泛,但强度较低,约为高斯的十分之一,很容易受到其他磁体的干扰。如果结合z轴陀螺仪的瞬时角度,可以使系统数据更加稳定。加速度是按重力方向测量的。在没有外力加速度的情况下,能准确输出滚/俯仰两轴姿态角,且该角度不会有累积误差,在较长的时间尺度下是准确的。但是,加速度传感器在测量角度方面的缺点是,加速度传感器实际上是采用MEMS技术来检测惯性力引起的微小变形,而惯性力在本质上与重力相同,因此加速度传感器不会区分重力加速度和外力加速度。当系统在三维空间中变速时,其输出是不正确的
陀螺仪的输出角速度是一个瞬时量,不能直接用于姿态平衡。计算角度需要角速度和时间积分。将得到的角度变化量与初始角度相加,得到目标角度。积分时间DT越小,输出角度越精确。但是陀螺仪的工作原理决定了它的测量基准是自身,在系统之外没有绝对的参考。另外,DT不能无限小,所以积分的累积误差会随着时间的推移迅速增大,导致输出角度与实际不一致,所以陀螺仪只能在较短的时间尺度内工作。
因此,在没有其他参考的基础上,为了获得更真实的姿态角,我们应该利用加权算法扬长避短,结合两者的优点,摒弃各自的缺点,设计一种算法,在短时间尺度上增加陀螺仪的权重,在较长时间尺度上增加速度权重,使系统输出角度接近真实值。
IMU工作原理
IMU是一种捷联惯性导航系统。该系统由三个加速度传感器和三个角速度传感器(陀螺仪)组成。加速度计用于感知飞行器相对于地面垂直线的加速度分量,速度传感器用于感知飞行器的角度信息。该子器件主要由两个a/d转换器ad7716b和64Ke/eprom存储器X25650组成。a/d转换器利用IMU各传感器的模拟变量,将其转换为数字信息,经CPU计算后输出飞俯仰角、倾斜角和侧滑角。e/eprom存储器主要存储各IMU传感器的线性曲线图和各IMU传感器的零件号和序列号。当零件刚启动时,图像处理单元读取e/eprom中的线性曲线参数,为后续角度计算提供初始信息。
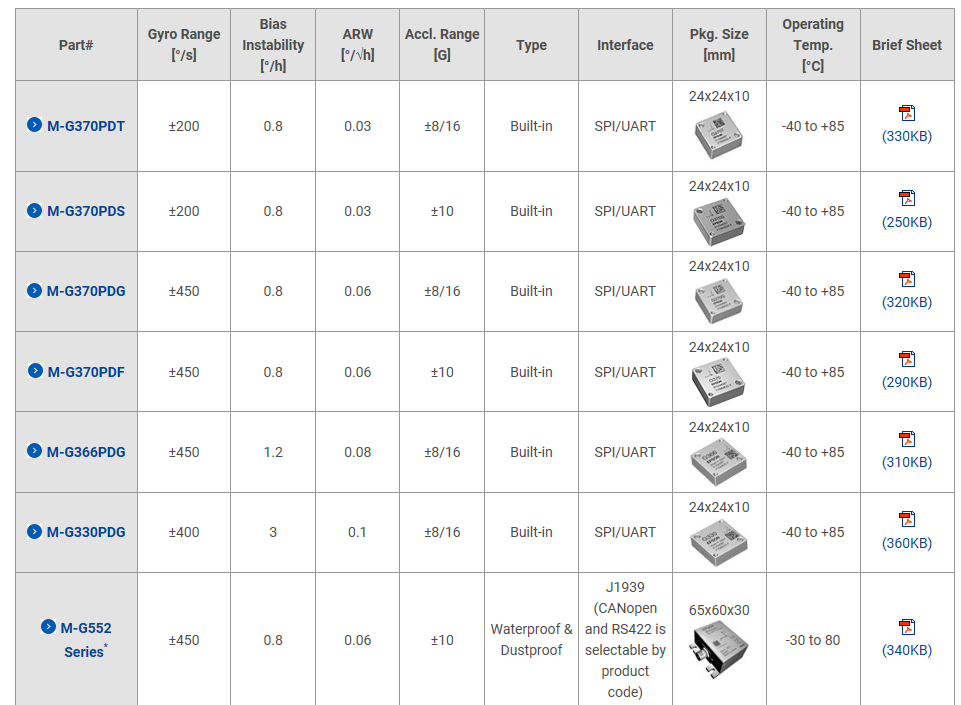
IMU推荐产品对比表: