
PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD

 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


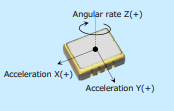
陀螺仪x轴通常与设备的长轴(通常是水平轴)对齐,它测量物体绕x轴旋转的角速度,也就是通常所说的俯仰角。俯仰角指的是物体相对于地平面的上下旋转角度,正值表示向上旋转,负值表示向下旋转。
陀螺仪y轴通常与设备的宽轴(通常是垂直轴)对齐,它测量物体绕y轴旋转的角速度,也就是通常所说的偏航角。偏航角指的是物体相对于水平面的左右旋转角度,正值表示向右旋转,负值表示向左旋转。
陀螺仪x和y的比例是根据具体设备和应用需要来确定的。在某些应用中,x和y的比例可能是1:1,即它们的测量范围和灵敏度相同。而在其他应用中,比例可能会有所不同,以满足不同方向上旋转的测量需求。比例的确定通常需要进行校准和调试,以确保陀螺仪在不同轴上的测量结果准确可靠。
对于一些需要高精度测量旋转和转动的应用,陀螺仪通常会与其他传感器(如加速度计)结合使用,通过综合陀螺仪和加速度计的测量结果,可以获得更准确和可靠的态信息例如,通过结合陀螺仪和加速度计的数据,可以实现对物体的姿态、方向和位置的实时跟踪和测量。
总结起来,陀螺仪的x轴和y轴分别测量物体绕x轴和v轴旋转的角速度,其中x轴通常与设备的长轴对齐,测量俯仰角,y轴通常与设备的宽轴对齐,测量偏航角。x和y的比例根据具体应用和设备需求来确定。最终的测量结果需要综合其他传感器的数据进行处理,以获得更准确和可靠的姿态信息,