
PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD

 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


IMU有助于飞行的稳定控制和电池充电的自动对接-
精工爱普生公司(TSE:6724,“Epson”)很高兴地宣布,日本宇宙航空研究开发机构(JAXA)选择了爱普生M-G370系列的惯性测量单元(IMU),用于部署在国际空间站(ISS)的日本实验舱“Kibo”上的移动相机机器人。日本宇宙航空研究开发机构开发的“Int-Ball2(内部球相机2)”自由飞行相机机器人自2023年6月以来一直在Kibo内部进行功能验证。
从2024财年起,爱普生将致力于为所谓的“新空间”部门开发IMU。这些IMU将用于小型卫星等使用消费品和工业产品的领域,这些产品需要更高的性价比和更短的交付时间。
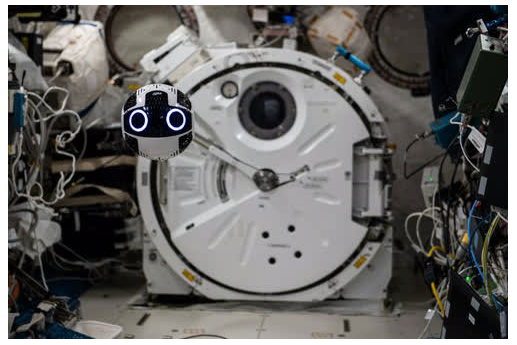
飞行检查期间的Int-Ball2©JAXA/NASA
Int-Ball2是一款机载无人机机器人,旨在支持国际空间站上的宇航员。它由地面控制远程操作,能够在国际空间站周围飞行,拍摄照片和视频。该相机用于捕捉宇航员进行各种实验时的图像,并与地面控制团队共享。目前,在Kibo工作的宇航员必须花时间调整相机设置和视角。通过Int-Ball2,地面控制团队可以直接远程控制视频拍摄过程。预计这将大大减少宇航员的工作量。
在国际空间站上,日本宇航员古川聪与地面控制器合作,对Int-Ball2进行初步功能检查。
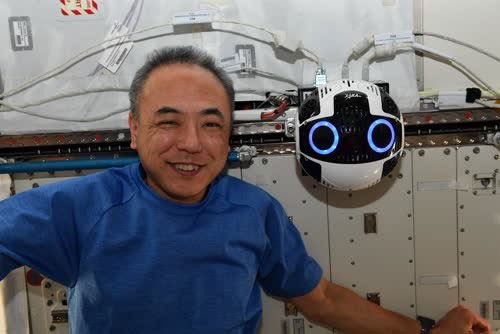
宇航员古川聪和Int-Ball2在对接站停靠©JAXA/NASA
Int-Ball2被设计为自动离开并返回其扩展坞进行充电。但在国际空间站,它必须在微重力环境中导航。
为此,需要估计其3DoF位置(X、Y、Z)和3DoF旋转姿态(滚转、俯仰和偏航)。Int-Ball2通过融合视觉同步定位和映射(VSLAM)和IMU数据来估计其位置。JAXA已经成功地展示了Int-Ball2的飞行能力以及自动释放和对接的功能。
用于Int-Ball2测试的Epson IMU是一种小型、轻便但极其精确的设备,有助于估计飞行过程中的空间位置和旋转姿态。

IMU inside Int-Ball2© JAXA/MEISEI
M-G370系列的主要特点
采用原装晶体陀螺传感器,具有高精度和稳定性
陀螺偏置不稳定性0.8°/√h角随机游动0.06-0.03°/√小时
小巧轻便(1“见方,10克)
低功耗设计(3.3 V,16 mA)

2024年2月,新的M-G370PDT加入了该系列产品阵容,该产品具有改进的角度随机行走和陀螺仪传感器的线性度。M-G370PDT可用于各种应用的建筑中。
示例应用程序
使用商业和工业产品的小型卫星1、EO/IR相机万向节2和天线的振动控制
无人驾驶设备(工业无人机、地面飞行器、海底探测探测器)和工业设备的振动、角度和轨道测量
导航系统