
PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD

 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


一般描述
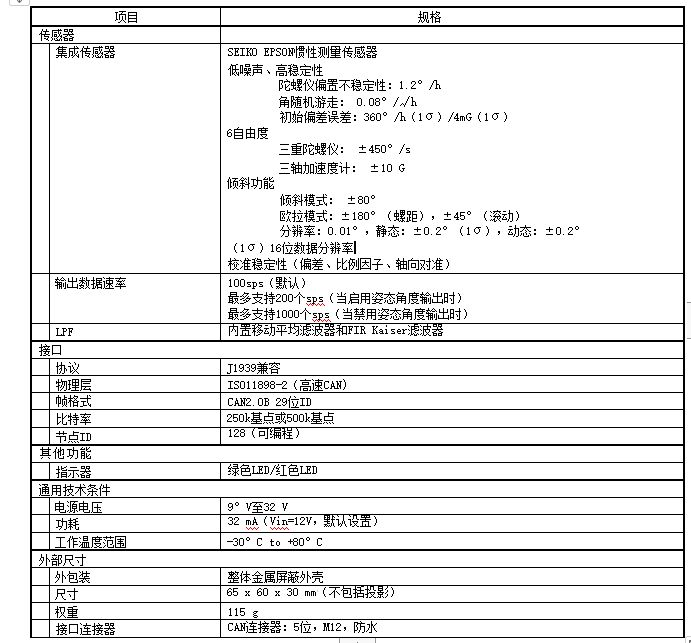
M-G552PJ1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和
线性加速度,并提供了高稳定性和高精度的测量能力与使用的高精度
补偿技术。通过控制器局域网(CAN)接口支持主机通信,M-G552PJ1
减少了用户引入惯性测量的技术障碍,并最小化了实现惯性的设计资源
运动分析和控制的应用程序。该装置被包装在一个防水和防尘的金属外壳中。它适用于工业和重型应用。
M-G552PJ1具有一个内置的姿态角度输出函数,使用了一个扩展的卡尔曼滤波器,优化了高速速度
操作和高度准确的姿态角度(滚动/倾斜)。这种特殊的实时性能是实现使用我们的独特性
DSP处理架构的效率,和低功耗。通过从主机系统卸载高速处理,可以降低应用程序或系统级的功耗和复杂性,否则这是实现高度动态姿态角度所必需的。
IMU具有高稳定性、高精度、小尺寸等特点,使其易于创建和区分在工业系统的各个领域的应用。
特点
应用程序
. 运动和振动测量
.平台稳定
. 无人驾驶系统的姿态检测
. 振动控制和稳定
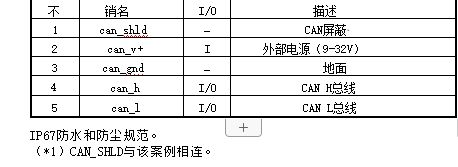
终端功能
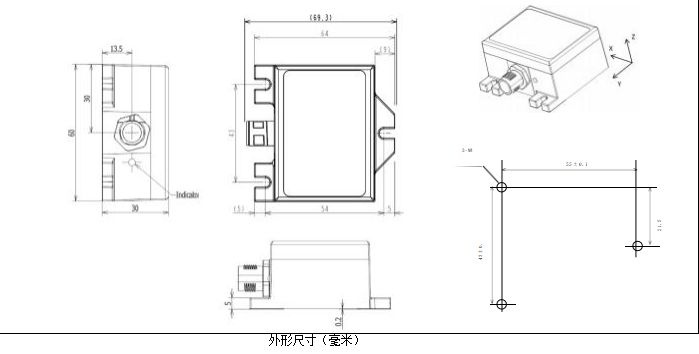
外形尺寸